

A “curse” has slowed the progress of autonomous cars, robots and other machines, but a Clemson University professor is working on a solution that just might break the spell.
Umesh Vaidya, a professor of mechanical engineering, has launched a new project aimed at overcoming the “curse of dimensionality.”
The project could have a wide range of applications, among them helping autonomous vehicles navigate off-road terrain filled with unpredictable obstacles, such as rocks and mud.
While the curse sounds like something out of a Harry Potter movie, it is a real-life challenge rooted in mathematics, not magic. As autonomous systems grow more complicated and solve tougher problems, the math behind their decision-making explodes in size.
Traditional approaches often become too slow or too complex to use in real time. That makes it harder for robots and vehicles to react quickly and safely.
“Humans make decisions almost automatically– we just know what’s important and what’s not,” Vaidya said. “Machines aren’t like that. For them, even simple choices can become overwhelmingly complex.”
At the core of Vaidya’s project is one of the biggest challenges in modern automation: how to design control strategies that are both fast and reliable. Control strategies are step-by-step rules that tell autonomous machines what action to take in different situations, with the goal of staying safe and reliable while getting the job done.
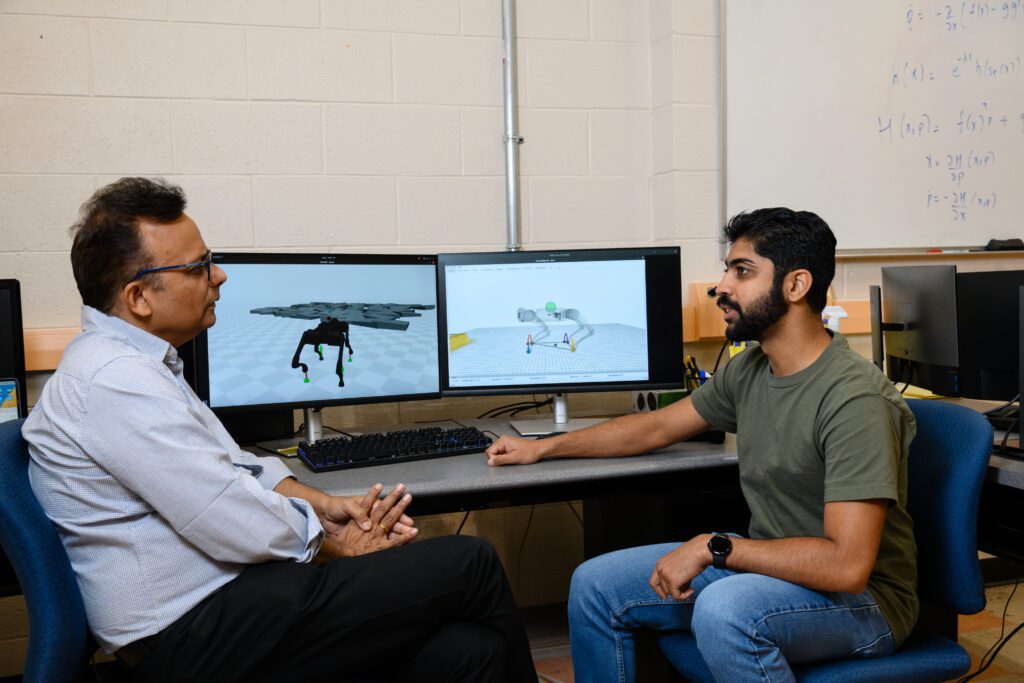
Vaidya’s approach combines traditional control methods with newer ideas from linear operator theory, especially the Koopman operator.
In simple terms, that means tough nonlinear problems can be translated into simpler linear ones. That lets the team break big challenges into smaller pieces–solving some exactly and approximating the rest–so computations become more scalable and tractable for complex systems.
Early demonstrations will focus on robotic systems, including dog-like robots that move across uneven terrain. The methods also have potential in energy systems and other autonomous technologies.
The project includes opportunities for students and outreach. Vaidya plans to involve graduate and undergraduate students in the research and to create K–12 events to spark early interest in STEM fields.
Funding for the three-year project comes from the National Science Foundation. It is based out of the Dynamics and Control for Autonomy and Intelligence (DyCo AI) in Clemson’s Fluor Daniel Engineering Innovation Building.
Alexander Leonessa, chair of Clemson’s Department of Mechanical Engineering, congratulated Vaidya and his team on landing the grant.
“Umesh is well positioned to lead this work,” Leonessa said. “His lab bridges rigorous theory with real-world robotics. That combination, plus a strong record of collaboration and student mentorship, puts Clemson at the forefront of scalable, safe autonomy under uncertainty. The funding is well deserved.”





